
Com baixo custo e efici�ncia energ�tica, a m�o rob�tica projetada pela equipe do Reino Unido pode agarrar coisas usando o movimento do ''pulso'' e a sensa��o da ''pele''
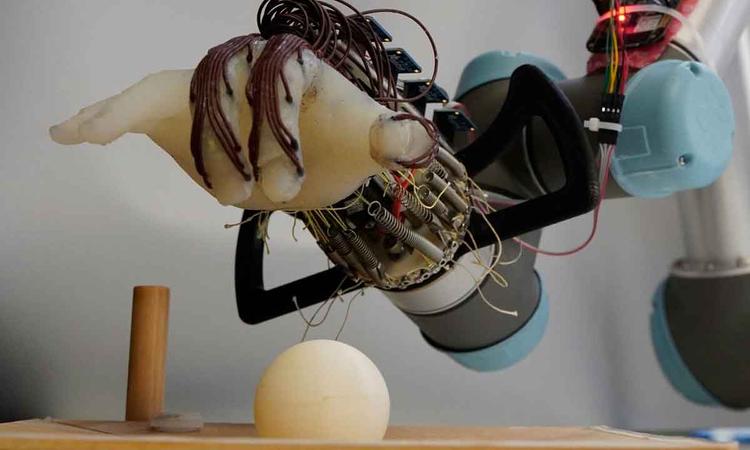
A m�o humana possui flexibilidade para manipular e agarrar objetos de diferentes tamanhos, formas e texturas com grande precis�o e agilidade. Complexas, tais a��es s�o desafiadoras para um rob�. Na tentativa de reproduzir essas habilidades motoras em dispositivos aut�nomos, pesquisadores da Universidade de Cambridge (Reino Unido) desenvolveram uma m�o rob�tica capaz de segurar uma variedade de objetos de diferentes pesos e n�o deix�-los cair, apenas com o movimento do pulso e dos sensores presentes em seus "dedos". Entre as vantagens da tecnologia, est�o o custo e o consumo energ�tico baixos.
Thomas George Thuruthel, professor de Rob�tica e Intelig�ncia Artificial (IA) do University College London e um dos respons�veis pela pesquisa, conta que a ideia do projeto surgiu do desejo de criar uma pe�a mec�nica que tivesse a destreza de uma m�o humana. "Acreditamos que as m�os rob�ticas devem ser fisicamente semelhantes � m�o humana, em termos de forma, tamanho e conformidade, e precisam de sensores de toque para realizar manipula��es gerais", afirma.
Impressa em 3D, a pe�a antropom�rfica foi constru�da com elast�meros de silicone que simulam a pele. Molas formam o tend�o do pulso, e o �cido polil�ctico – material muito utilizado para impress�es em 3D – reproduz a estrutura �ssea. Os pesquisadores tamb�m implantaram sensores t�teis, a fim de que a m�o pudesse "sentir" o que estava tocando. "Um dos maiores desafios foi adicionar elementos de detec��o t�til a um design anterior de m�o rob�tica macia, sem sacrificar a complac�ncia da m�o", relata o pesquisador.

A m�o projetada pela equipe brit�nica n�o pode mover os dedos de forma independente. No entanto, ela foi projetada para realizar movimentos passivos baseados no pulso e produzir uma s�rie de movimentos complexos. Segundo Thuruthel, o movimento completamente passivo torna baixo o consumo de energia utilizado no funcionamento da pe�a rob�tica, uma vez que n�o h� necessidade de muitos motores para o agarramento dos objetos. Al�m disso, os sensores da m�o funcionam com baixa pot�ncia. "Devido �s propriedades f�sicas da m�o, mesmo esse design simples pode realizar muitas tarefas de manipula��o usando apenas o pulso", detalha.
Os pesquisadores realizaram mais de 1.200 testes para observar a capacidade do rob� de agarrar pequenos objetos sem deix�-los cair. Inicialmente, ele foi treinado usando pequenas bolas de pl�stico impressas em 3D. A m�o rob�tica agarrou-as, utilizando uma a��o pr�-definida obtida por meio de demonstra��es humanas. Depois de finalizar o treinamento com as bolas, a pe�a tentou agarrar diferentes objetos, incluindo um p�ssego, um mouse de computador e um rolo de pl�stico-bolha. Nesses testes, a m�o conseguiu segurar com sucesso 11 dos 14 objetos, conforme resultados apresentados em artigo publicado pela revista Advanced Intelligent Systems.
A partir das informa��es processadas pelo sensor t�til, a equipe aplicou uma t�cnica de interpreta��o por tentativa e erro. A ideia era que o rob� aprendesse a melhor t�cnica para segurar os diferentes tipos de objetos usados nos testes. "Tivemos que recorrer ao aprendizado de m�quina para resolver esse problema de modelagem e, portanto, v�rios exemplos do mundo real s�o necess�rios para que o rob� compreenda as informa��es de toque recebidas", explica George Thuruthel.
Roberto de Souza Baptista, professor de engenharia eletr�nica na Faculdade do Gama (FGA) da Universidade de Bras�lia (UnB), avalia que a redu��o do gasto energ�tico da m�o rob�tica pode ser interessante em projetos que requerem baterias, como pr�teses de m�o. "As baterias normalmente s�o pe�as grandes e pesadas, se comparadas com os outros componentes. Al�m disso, tem a quest�o do tempo de uso entre as recargas, como nos celulares", diz.
Na avalia��o da professora de engenharia eletr�nica da UnB, Claudia Patr�cia Ochoa, a habilidade da m�o rob�tica de saber medir a for�a necess�ria para agarrar e segurar objetos favorece uma rela��o de menor risco para o ser humano, enquanto realiza uma tarefa conjunta com um rob�. "A capacidade de medir diferentes pe�as faz com que ele seja tamb�m mais seguro nessa intera��o que teria com o ser humano."
Apesar da experi�ncia bem-sucedida, a m�o rob�tica apresenta algumas limita��es. De acordo com Thuruthel, o n�mero de elementos sensores � limitado e precisa ser ampliado para informa��es mais ricas. "Precisaremos tamb�m adicionar alguns elementos de atua��o na m�o, com o objetivo de ampliar suas capacidades de movimento", espec�fica.
O grupo de pesquisadores busca, agora, adicionar atuadores � m�o para aumentar o n�mero de sensores e ampliar a capacidade de reconhecimento de objetos da m�o rob�tica. Com isso, ser� poss�vel faz�-la realizar tarefas de manipula��o baseadas em toques mais complexas, como pegar objetos fr�geis e medir a for�a aplicada sobre eles.
Alta sensibilidade Os cientistas tamb�m investem na cria��o de m�os rob�ticas com a habilidade de identificar objetos. Inspirados nos dedos humanos, os quais conseguem diferenciar um objeto somente pelo toque, pesquisadores do Massachusetts Institute of Technology (MIT) desenvolveram uma m�o tecnol�gica de alta resolu��o que reconhece diferentes objetos apenas com um aperto de m�o.
Sandra Q. Liu, respons�vel por liderar o estudo, conta que a inspira��o da pesquisa veio da necessidade de replicar aspectos sens�veis e flex�veis dos dedos humanos. Segundo a pesquisadora, os dedos humanos s�o fortes por causa dos ossos r�gidos internos, mas complacentes por causa da pele. "Al�m disso, somos capazes de fazer uma detec��o cont�nua ao longo dos lados e da superf�cie frontal de nossos dedos, o que nos permite realizar muitas tarefas diferentes de reconhecimento de objetos ou explora��o de toque", explica.
Os tr�s dedos que formam a m�o rob�tica de alta sensibilidade conseguem reconhecer um objeto com at� 85% de precis�o. A equipe imprimiu em 3D um esqueleto de um material semirr�gido forte o bastante para segurar objetos mais pesados e dotado de flexibilidade. Em seguida, moldaram o silicone transparente no esqueleto, para que a superf�cie geral do dedo fosse compat�vel.
O reconhecimento dos objetos por parte dos sensores dos dedos da m�o rob�tica � feito por meio de um banco de dados. "Essencialmente, usamos uma rede de aprendizado de m�quina para treinar em tr�s objetos diferentes, para que os sensores saibam como reconhec�-los", explica a pesquisadora. O projeto foi apresentado durante a RoboSoft Conference, confer�ncia internacional de rob�s que ocorreu este ano em Cingapura.
Segundo Liu, a integra��o de todos os componentes foi o principal desafio enfrentado pela equipe da universidade para formar a m�o rob�tica. "Quer�amos usar um sensor baseado em c�mera, porque � de baixo custo e com alta resolu��o. Precis�vamos dessas c�meras para ver toda a superf�cie frontal e lateral do dedo. Tamb�m precis�vamos poder integrar LEDs e silicone de forma que o silicone n�o ca�sse do esqueleto", relata.
Tamb�m professor da Faculdade do Gama (FGA) da UnB, Daniel Mauricio Mu�oz acredita que a alta sensibilidade da pe�a mec�nica ajudar� a auxiliar na produ��o de objetos mais delicados, que podem ser danificados com m�os rob�ticas desprovidas da mesma habilidade. "Pode evitar deformar objetos, ent�o, tem muita possibilidade de aplica��o, dependendo do setor da ind�stria", avalia.
O rob� ainda n�o consegue reconhecer outros objetos. Al�m disso, o silicone em torno do esqueleto limita o quanto a m�o pode dobrar. "Embora tenhamos adicionado sulcos para ajudar a solucionar esse problema, eles n�o foram capazes de ajudar totalmente e estamos ansiosos para corrigir isso no futuro", detalha Liu. A m�o rob�tica tamb�m n�o sabe a for�a necess�ria para segurar os objetos. "Atualmente, temos os motores controlando os dedos at� sentirem um limite de resist�ncia do objeto."
Para o futuro, a equipe da universidade deseja ampliar a aplica��o do rob� para uso em ambientes do lar, especificamente na cozinha. "O pr�ximo passo ser� adicionar atuadores � m�o, aumentar o n�mero de elementos sensores e realizar tarefas de manipula��o baseadas em toque mais complexos, como pegar objetos fr�geis e medir a for�a aplicada sobre eles", aposta Liu.
Inspira��o da natureza
Ao longo de milh�es de anos de evolu��o, a tromba de um elefante desenvolveu a capacidade flex�vel de balan�ar e de dobrar em todas as dire��es. Inspirados nessa habilidade, cientistas da Saarland University, na Alemanha, criaram um bra�o rob�tico bi�nico que t�o flex�vel e suave quanto o �rg�o do elefante.
Paul Motzki, respons�vel por liderar o estudo, explica que o bra�o rob�tico bi�nico — chamado de e-Trunk — se caracteriza pela agilidade e tem potencial de aplica��o em v�rias �reas industriais. "Essas vantagens resultam em um grande n�mero de poss�veis campos de aplica��o. Endoscopia industrial, cirurgia minimamente invasiva, intera��o homem-m�quina e manuten��o de reator nuclear s�o apenas alguns exemplos", diz.
As ligas de n�quel-tit�nio — que constituem os "m�sculos" do bra�o bi�nico — permitem que a estrutura contraia e relaxe de forma semelhante aos m�sculos dos organismos vivos. Isso pode ocorrer devido � capacidade do n�quel-tit�nio de "lembrar" sua forma original e retornar a ela ap�s ser deformado. Se um fio de n�quel-tit�nio for aquecido, por exemplo, por uma corrente el�trica, ficar� mais curto. Quando a corrente � desligada, o fio esfria e volta ao comprimento original.
Para testar o e-Trunk, a equipe aplicou correntes el�tricas a fim de flexionar os m�sculos da pe�a rob�tica. Dessa forma, os fios musculares artificiais se encurtaram, fazendo com que o bra�o dobrasse. Ao controlar como os m�sculos artificiais podem ser flexionados, os pesquisadores conseguiram fazer com que ele executasse quase qualquer sequ�ncia de movimentos. Sem a necessidade de sensores adicionais, os cientistas podem controlar a posi��o do tronco com rapidez e precis�o. A tecnologia foi apresentada este m�s na Hannover Messe, uma das maiores feiras do mundo, dedicada a inova��es no ramo da ind�stria.
Os pr�ximos passos da pesquisa s�o aprimorar o bra�o, otimiz�-lo e adapt�-lo para diferentes requisitos. Al�m disso, a equipe deseja ampliar a flexibilidade da estrutura. "As etapas seguintes incluem um processo de otimiza��o, para simplificar o e-Trunk e adapt�-lo a diferentes requisitos e estruturas de flex�o mais complexas", afirma Motzki.
* Estagi�ria sob a supervis�o de Rodrigo Craveiro
*Para comentar, fa�a seu login ou assine